|
I am a Ph.D Candidate in the Computer Science department at Rutgers, co-advised by professors Abdeslam Boularias and Kostas Bekris . My research interests lie in the field of Robotics, Computer Vision and Machine Learning. Specifically, I am working on problems related to perception for Robotic Manipulation. Email / CV / Google Scholar / GitHub / LinkedIn / Thesis / Thesis Presentation |

|
|
|
|
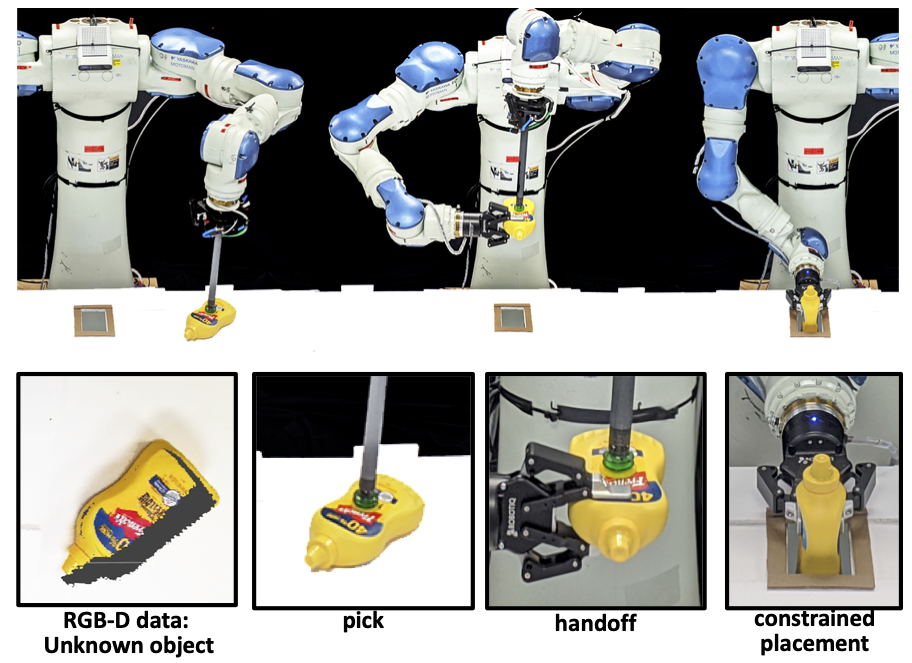
Chaitanya Mitash, Rahul Shome, Bowen Wen, Abdeslam Boularias, Kostas Bekris IEEE Robotics and Automation Letters (RA-L) & IROS, 2020 project page/ arXiv/ supplementary material An integrated perception and manipulation planning pipeline with a dynamic object representation, demonstrating high success rate and efficiency in solving pick-and-constrained placement of previously unseen objects. |
|
Bowen Wen, Chaitanya Mitash, Baozhang Ren and Kostas Bekris IEEE International Conference on Intelligent Robots and Systems (IROS), 2020 project page/ arXiv Learning in simulation to predict residual poses for object models in RGB-D sequences. |
|
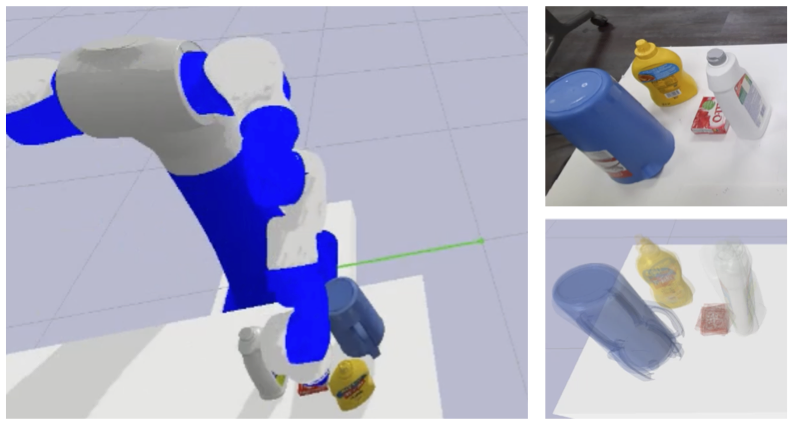
Rui Wang, Chaitanya Mitash, Shiyang Lu, Daniel Boehm, Kostas E. Bekris IEEE International Conference on Intelligent Robots and Systems (IROS), 2020 arXiv A perception and motion planning framework that considers the uncertainty in object poses to generate picking plans that minimizes the chance of collision and maximizes the likelihood of success. |
|
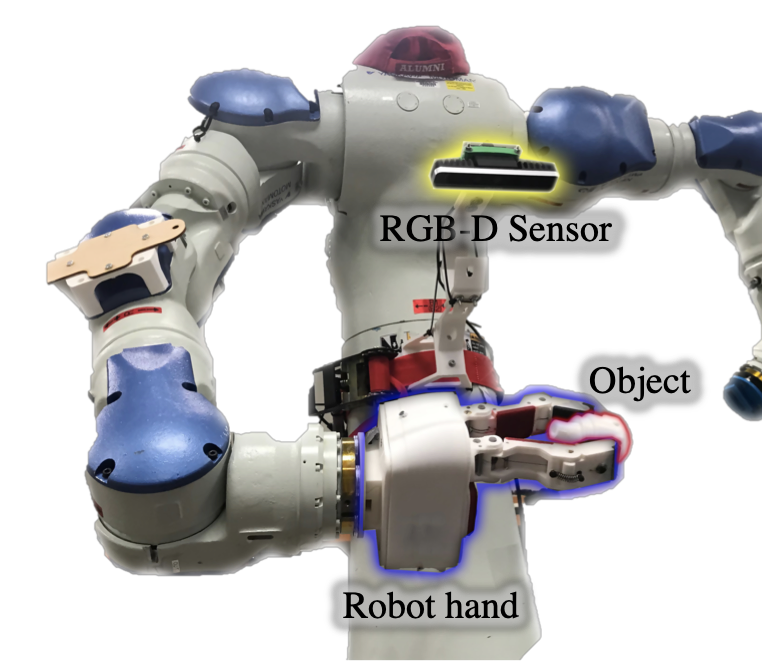
Bowen Wen, Chaitanya Mitash, Sruthi Soorian, Andrew Kimmel, Avishai Sintov and Kostas Bekris IEEE International Conference on Robotics and Automation (ICRA), 2020 arXiv/ code Simultaneous pose estimation of robot hand and the hand-held object via 3d pointset registration while considering physical consistency. |
|
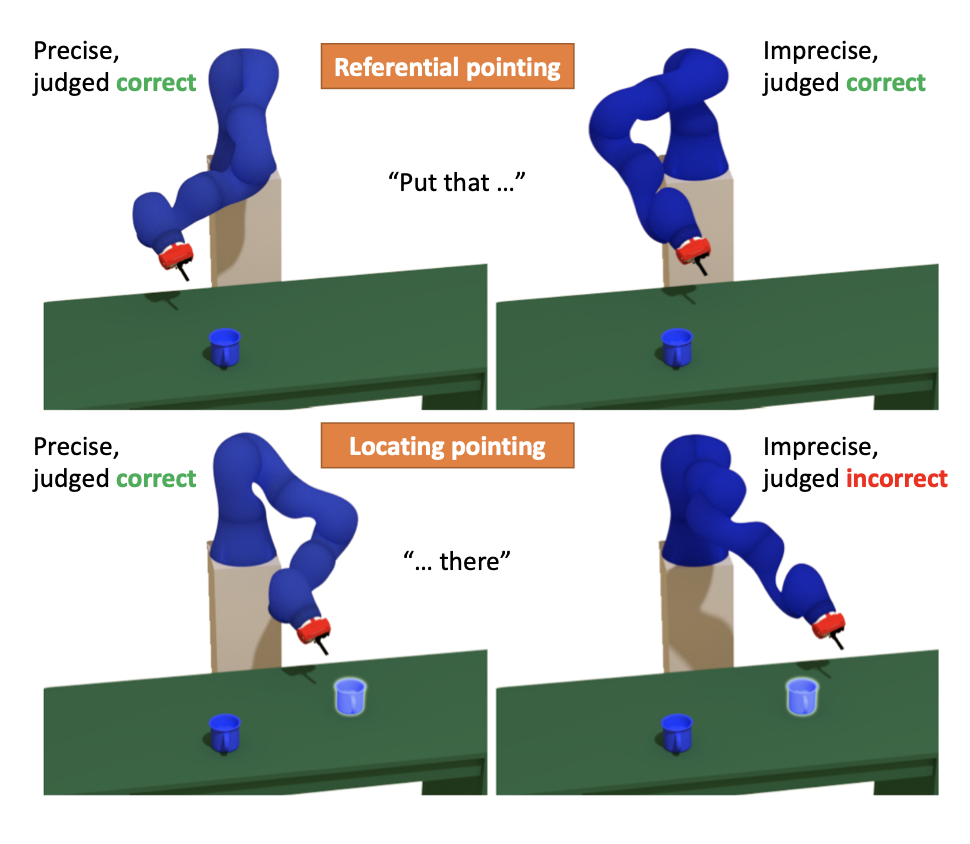
Malihe Alikhani, Baber Khalid, Rahul Shome, Chaitanya Mitash, Kostas Bekris, Matthew Stone AAAI Conference on Artificial Intelligence, 2020 arXiv Presents a set of interpretive principles for how a robotic arm can use pointing actions to communicate task information to people. The evaluation distinguishes two classes of pointing actions that arise in pick-and- place tasks: referential pointing (identifying objects) and locating pointing (identifying locations). |

|
Chaitanya Mitash, Bowen Wen, Kostas Bekris, and Abdeslam Boularias Conference on Robot Learning (CoRL), 2019 arXiv / code Introduces key machine learning operations for joint 6D pose estimation of multiple instances of objects in challenging scenarios by learning over just simulated data. |
|
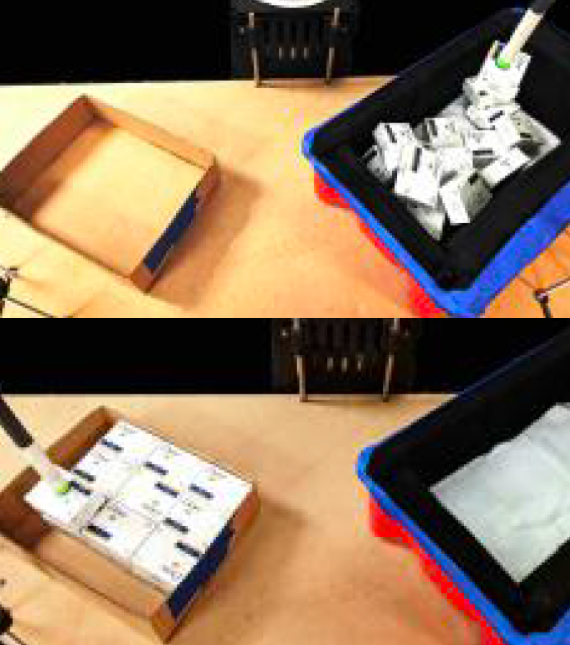
Rahul Shome, Wei N. Tang, Changkyu Song, Chaitanya Mitash, Chris Kourtev, Jingjin Yu, Abdeslam Boularias, and Kostas Bekris IEEE International Conference on Robotics and Automation (ICRA), 2019 project page / arXiv Introduces manipulation primitives (toppling, adaptive pushing and fine-correction) to achieve robust bin packing with a simple vacuum-based end-effector. A robotic system is develeoped and large-scale experiments are performed to demonstrate its efficacy. |
|
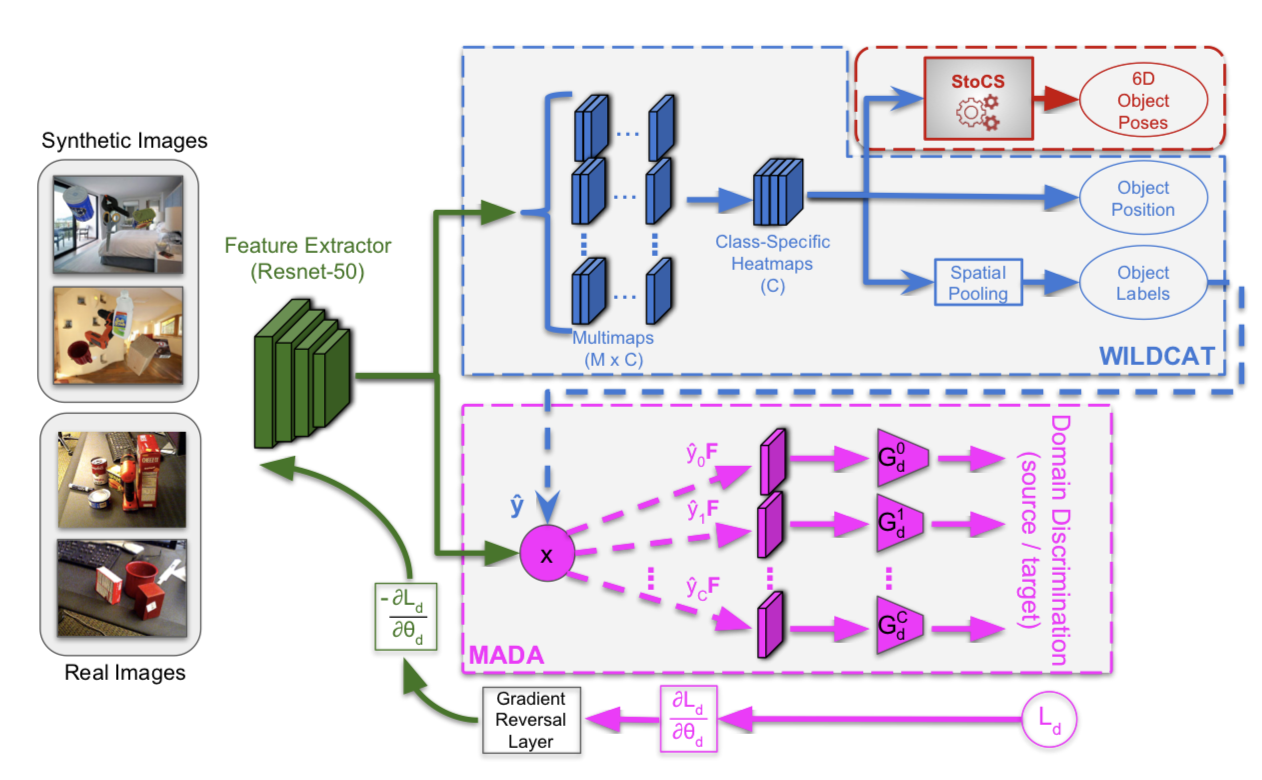
Jean-Philippe Mercier, Chaitanya Mitash, Philippe Giguere and Abdeslam Boularias IEEE International Conference on Robotics and Automation (ICRA), 2019 arXiv Sim2real adaptation of object detector via weakly labeled images and utilization of activation maps for 6d object pose estimation. |
|
Chaitanya Mitash, Abdeslam Boularias and Kostas Bekris British Machine Vision Conference (BMVC), 2018 arXiv / code A soft segmentation output can be used to guide sampling-based pointset registration to retrieve object poses. |
|
Chaitanya Mitash, Abdeslam Boularias and Kostas Bekris International Journal of Robotics Research (IJRR), 2019 project page / arXiv Integrates the self-supervised learning via physics simulation with online scene-level reasoning. |
|
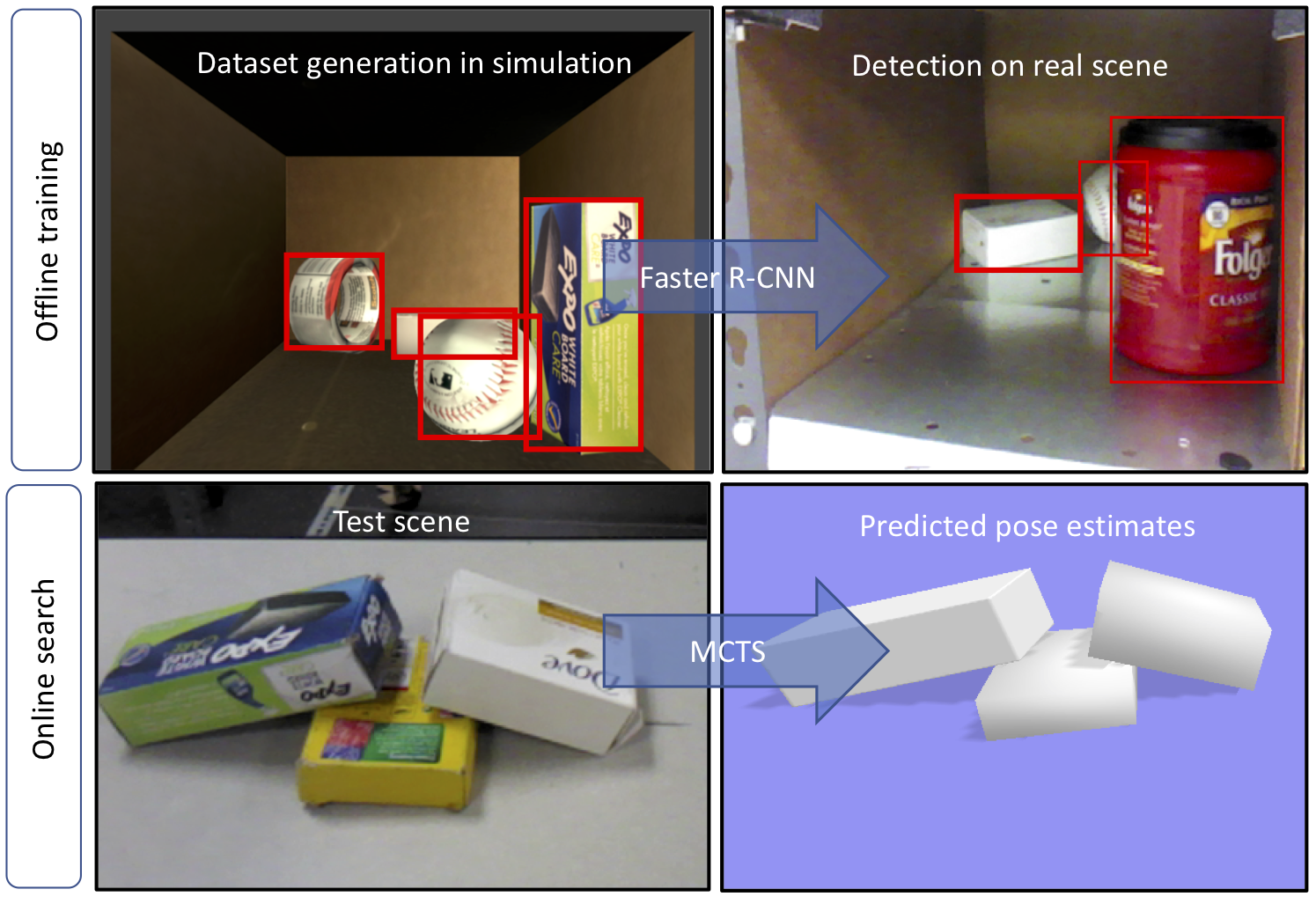
Chaitanya Mitash, Abdeslam Boularias and Kostas Bekris IEEE International Conference on Robotics and Automation (ICRA), 2018 project page / arXiv A combinatorial search algorithm to generate, evaluate and select physically-consistent scene hypothesis from independent object detections. |
|
Chaitanya Mitash, Kostas Bekris and Abdeslam Boularias IEEE International Conference on Intelligent Robots and Systems (IROS), 2017 project page / arXiv / code Physically-realistic simulation allows better training for object detection in robotics setup and can bootstrap a self-learning process to automatically collect and label real images and improve the detector over time. |
|
(Reviewer) Conference on Neural Information Processing Systems/NeurIPS (2019, 2020) (Reviewer) IEEE Robotics and Automation Letters/RA-L (2018, 2020) (Reviewer) IEEE International Conference on Intelligent Robots and Systems/IROS (2017, 2018, 2019, 2020) (Reviewer) IEEE International Conference on Robotics and Automation/ICRA (2018, 2019) (Reviewer) Conference on Computer Vision and Pattern Recognition/CVPR 2019 (Meta-reviewer) Robotics Science and Systems (RSS) Pioneers 2020 (Assisted Review) Robotics Science and Systems (RSS) 2020 (Assisted Review) The Workshop on the Algorithmic Foundations of Robotics/WAFR 2020 (Assisted Review) Conference on Robot Learning/CoRL 2019 |